


新型平板动力轨道车导航控制系统研究与实践
发布时间:2021-04-01 16:40 浏览:平板动力轨道车(搬运车)一般体积较大,载重可达几十吨,采用遥控操作或者专人驾驶,故存在体积大、超重量、驾驶困难以及安全防护的问题。
为了解决搬运平车的问题,本研究提出一种基于红外技术与视频技术相结合的电动平车导航控制系统,可以实现平板动力轨道车在厂区的自动运行,根据工位设定,自动寻轨,运行于设定好的工位,实现无人控制,并且具有防撞等功能,大大减少驾驶平车时存在的安全隐患,为电动平车的驾驶提供了很大的便利。
1平板动力轨道车导航控制系统特点
电动平车主要用于厂房内的物品搬运,具有体积大、吨位高、安全系数要求高等特点。当前应用的导航方案主要有磁导航、红外导航、激光导航等方案。磁导航在电动平车应用中需要铺设专用的磁体轨道,在一些厂区里存在消磁的风险,并且轨道铺设成本较高。
红外导航轨道铺设方便,但电动平车工作场所分为室内和室外,光照变化较大,平车的体积也较大,红外导航干扰源很多,稳定性不够,一般作为辅助导航;当前应用较多的是激光导航,但激光传感器价格高昂,对安装位置也有很多要求。
基于红外与视频结合的电动平车导航控制系统,只需要铺设黑白相间的轨道,对光照和环境的抗扰度很好,成本较低;在标识轨道的协助下,计算机算法也较简单,可以通过低档的工控机实现;通过优化算法可以提高系统的抗扰度,并且可以辅助做各种位置控制,具有结构简单、安全性高和成本较低的特点,非常适合电动平车的应用场合。
2 红外和视频导航控制系统的架构设计
本研究提出的基于红外与视频结合的电动平车导航控制系统,可以实现电动搬运平车在厂区的自动运行,可以根据工位设定,自动寻轨,运行于设定好的工位,实现无人控制,并且具有防撞等功能。主要架构如图1所示,包括摄像头、红外传感器、控制板、驱动板、雷达防撞检测、地面路线和工位标识等设备。

图1 导航控制系统架构图
摄像头主要拍摄地面路线和工位标识,转换成数字信号传递给控制板进行处理。由于电动平车的体积特别大,并且要满足前进和后退两个方向运动,所以采用前后双摄像头的方案,可以保障车辆稳定可靠地运行。
厂房具有环境复杂多变的特点,一般厂家要求具备两种导航手段,以提高电动平车运行可靠性。本研究主导航采用视频信号处理,配备红外传感器导航作为补充,增加防撞信号处理、路线和工位设定等功能,通过控制器域网(controller area network, CAN)总线连接车辆控制器实现平车的运行控制。
车体四周配备雷达系统,主要用于防撞信号采集,通过CAN总线连接控制板。控制系统通过CAN通信,将各个功能部分进行连接。
电动平车工作时,控制器通过输入设备设定行进路线和工位停留时间等信息,通过摄像头获取地面路线和工位标识,红外传感器主要是跟踪地面轨道的作用,起辅助导航的功能;系统经过数据处理,进行自动轨道辨识,把电机驱动信号通过驱动板发送给传动电机,实现电动平车的自动导航运行;平车通过雷达进行周边物体检测,实现防撞功能。
3 视频处理程序设计
视频导航为系统的主导航,为主要设计对象,控制系统采用一体机式的计算机,可以安装操作系统,便于视频的软件处理、轨道辨识;系统采用100M像素的摄像头,进行轨道判断和工位图标的识别,控制系统根据视频处理的结果进行电机驱动配置,以实现电动平车的自动寻轨运行。
3.1 视频处理程序架构
变压器摄像头采集图像信息,传递给控制系统,控制系统需要对图形进行处理,处理过程主要为图形的灰度色处理、轨道形成(二值化处理)、切线轨迹判断、运行方向辨识、电机驱动信号生成等几个步骤,其中二值化处理、切线轨迹判断为关键步骤。程序的处理流程如图2所示。
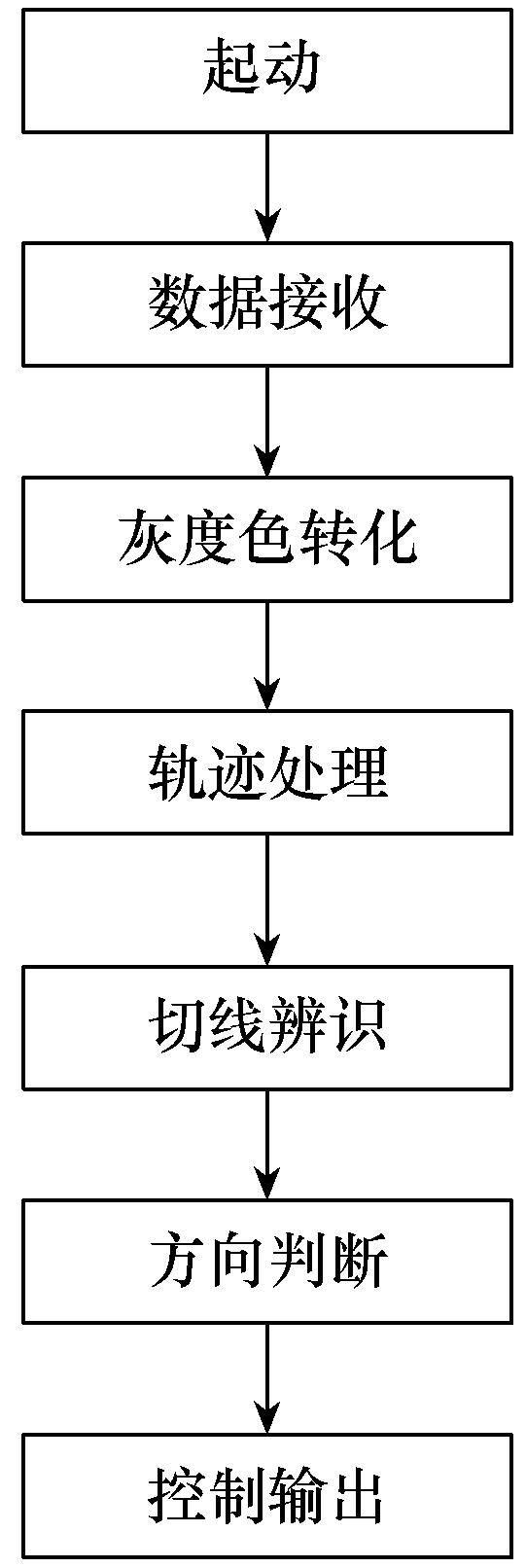
图2 视频处理程序流程
轨迹处理是程序的关键技术,本研究采用OTSU算法的二值化处理技术;切线判断主要采用处理好的轨迹进行切线的求值,切线算法为固定长度的横向偏差,如图3所示,计算出偏差值ef,根据偏差的大小和正负,判断车辆需要行进的方向,作为车辆的预设方向值;车辆方向控制以预设方向值作为参考,采集车辆轮架电机偏转的方向值进行闭环的控制,预设方向值为Dr,采样的方向值为Ds,方向偏差为Ed,相互关系为
公式(1)
根据偏差进行比例积分微分控制,以实现稳定快速的方向控制。
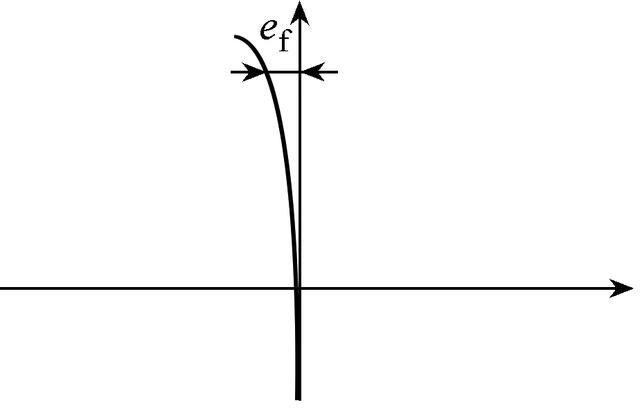
图3 轨迹切线判断
3.2 二值化处理
二值化处理是对获得的灰度色图形进行处理,以获得真实的轨迹图形,采用二值化算法,获得边界曲线,也是采集的运行曲线;实际工厂环境具有轨迹存在污点、颜色偏差、图形干扰、光线偏差等多种情况,本研究采用OTSU算法进行处理。
OTSU算法是由日本学者OTSU于1979年提出的一种对图像进行二值化的高效算法,是一种自适应的阈值确定的方法,又称大津阈值分割法,是最小二乘法意义下的最优分割。
本研究中算法的重点是选择合适阀值,进行边界辨识,而OTSU算法能够较好地解决这个问题,根据地面的轨道图形,可以有效分析污点、阳光对轨道的影响,本研究的轨道横坐标分为300个采样点,灰度值取值范围为0~200;根据OTSU算法计算出最优的阀值,判断轨道的边界,灰度值一半的分布如图4所示。

图4 图形一半的灰度值分布
在算法设计中,Matlab中自带OTSU算法,调用即可
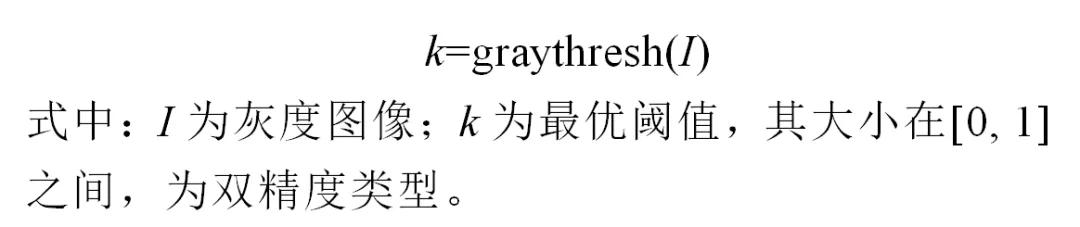
公式(2)
代码如下:
1 close;clear;clc;
2 I=im2double(imread('coins.png'));
3 k=graythresh(I); %得到最优阈值
4 J=im2bw(I,k); %转换成二值图,k为分割阈值
5 subplot(121);imshow(I);
6 subplot(122);imshow(J);
4 实验结果
根据上文分析过程进行了实验样机的设计,轨道铺设黑白相间的油漆,方便摄像头的拍摄,也可以连接红外传感器,摄像头采用常用的720P或1080P高清接口,摄像头拍摄轨道发送给小型工控机,目前使用10寸工控触摸一体机,配置N2853赛扬双核,2G内存,32G硬盘;工控机通过算法计算出工作要求,发送给比例阀(PRM2-06,通径06,压力至32MPa,流量至40L/min)。
控制系统包含普通摄像头、红外传感器、工控机、驱动板卡等设备,总成本不超过2000元人民币,量产后成本会进一步下降,具有低成本的优势。
视频处理采用二值化处理,获得的轨迹图形如图5所示,可以对阳光干扰、图形偏差等情况进行处理。

图5 二值化处理结果图
采用视频处理的技术,搭建10t的电动平车实验条件,实现10km/h的运行效果,具体车辆和轨迹如图6所示。
图6平板动力轨道车运行
5 结论
本文提出的基于红外与视频结合的电动平车导航控制系统,只需要铺设黑白相间的轨道,对光照和环境的抗扰度很好,成本较低;在标识轨道的协助下,计算机算法也较简单,可以实现电动平车上通过低档的工控机实现;通过优化算法可以提高系统的抗扰度,并且可以辅助进行各种位置控制,具有结构简单、安全性高和成本较低的特点,非常适合电动平车的应用场合。
通过研究及实验验证,发现电动平车体积大、吨位重,转向和速度控制需要精确的控制模型,本课题组将继续深入研究电动平车自动导航的建模方法以及控制算法。
无相关信息
Copyright © 2002-2018 河南帕菲特搬运设备有限公司 版权所有 地址:河南省新乡市经济技术开发区纬八路东段路南 豫ICP备15037548号-3
